Smart Portable Fuzzy Logic Control Systems for Active Ankle Foot
DOI:
https://doi.org/10.54741/asejar.2.5.6Keywords:
fuzzy logic, defuzzification, ankleAbstract
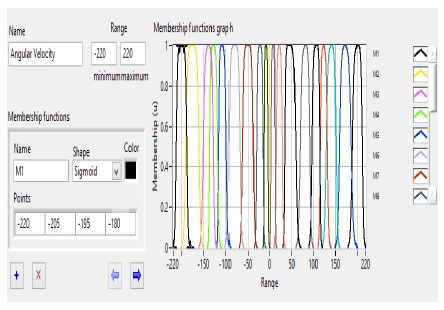
Without our foot, which God gave us as a gift to assist us in walking, running, and dancing, our daily activities would be negatively impacted. But occasionally, because of neurological conditions or strokes, the muscles or joints that control our gait pattern are also affected, which results in a gait pattern that is disrupted. This abnormality makes it difficult to maintain a correct foot landing and foot clearance throughout the foot striking and swing phases, respectively. Ankle Foot Orthosis (AFO), an orthotic device used to modify gait patterns, is created to get around this restriction. As a result, this paper enters the picture, and the controller is created and implemented onto the c-RIO to control the actuation mechanism for the device utilizing fuzzy logic.The controller is created using fuzzy logic and installed on the c-RIO according to the design of the paper. Analog gyroscope data is used to gather the gait patterns of both feet and feed them to the controller. In order to analyze the gait patterns, only two parameters—angle and angular velocity—are taken into account. Fuzzification, fuzzy if-then rules, and defuzzification are the three steps in the controller design process. The output that will operate the actuator is the defuzzified output. Extension or flexion With a regular walking speed, motion aid is given during various parts of the gait cycle. Designing an intelligent control system to initiate the necessary motion to generate flexion or extension by examining inputs from the sensors constitutes the bulk of the work. Additionally, the sensor data induces a torque through an actuator. By continuously observing the gait patterns, the control system gives real-time control of the damaged foot. The sensor system with a gyroscope produces the input signals for the control system. Plantar-flexion and dorsiflexion movements of the ankle during walking are provided by the FLC created in Laboratory Virtual Instruments Engineering Workbench (LabVIEW).
Downloads
Downloads
Published
How to Cite
Issue
Section
ARK
License
Copyright (c) 2023 Preeti Madan

This work is licensed under a Creative Commons Attribution 4.0 International License.
Research Articles in 'Applied Science and Engineering Journal for Advanced Research' are Open Access articles published under the Creative Commons CC BY License Creative Commons Attribution 4.0 International License http://creativecommons.org/licenses/by/4.0/. This license allows you to share – copy and redistribute the material in any medium or format. Adapt – remix, transform, and build upon the material for any purpose, even commercially.